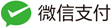
简介

为当前状态下数据的输入,
表示接收到的上一个节点的输入。
为当前节点状态下的输出,而
为传递到下一个节点的输出。
通过上图的公式可以看到,输出 h’ 与 x 和 h 的值都相关。
而 y 则常常使用 h’ 投入到一个线性层(主要是进行维度映射)然后使用softmax进行分类得到需要的数据。
序列形式的表现,如下
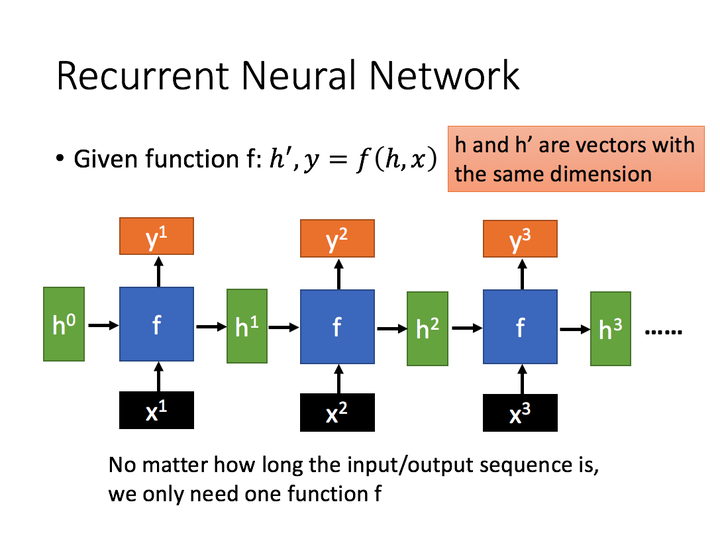
LSTM
-
是一种特殊的RNN,主要是为了解决长序列训练过程中的梯度消失以及梯度爆炸问题。
-
相比普通的RNN,LSTM能够在更长的序列中有更好的表现
相比RNN只有一个传递状态 ,LSTM有两个传输状态,一个
(cell state),和一个
(hidden state)。(Tips:RNN中的
对于LSTM中的
)
其中对于传递下去的 改变得很慢,通常输出的
是上一个状态传过来的
加上一些数值。
而 则在不同节点下往往会有很大的区别。
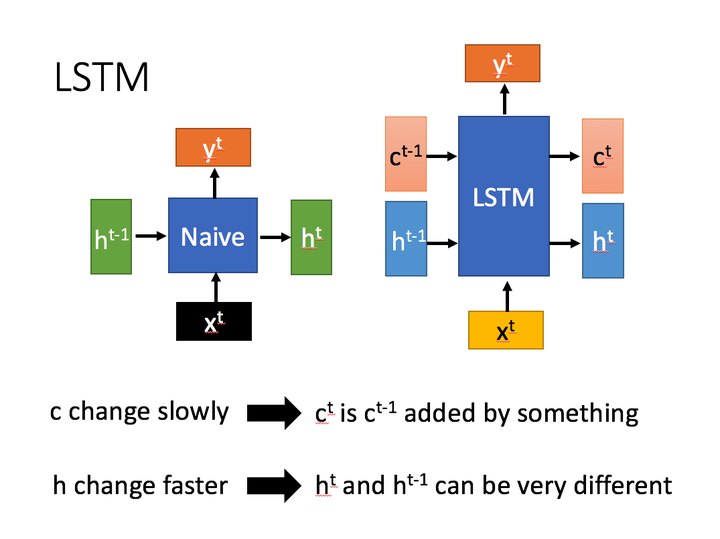
深入LSTM结构
下面具体对LSTM的内部结构来进行剖析。
首先使用LSTM的当前输入 和上一个状态传递下来的
拼接训练得到四个状态。
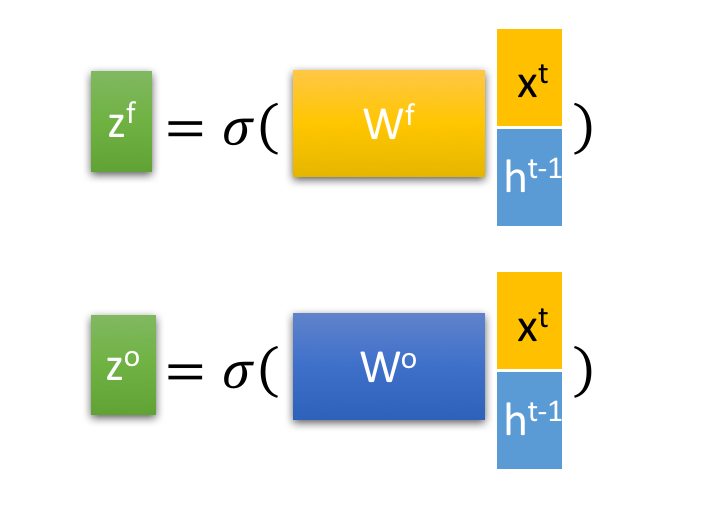
其中, ,
,
是由拼接向量乘以权重矩阵之后,再通过一个
激活函数转换成0到1之间的数值,来作为一种门控状态。而
则是将结果通过一个
激活函数将转换成-1到1之间的值(这里使用
是因为这里是将其做为输入数据,而不是门控信号)。
是Hadamard Product,也就是操作矩阵中对应的元素相乘,因此要求两个相乘矩阵是同型的。
则代表进行矩阵加法。
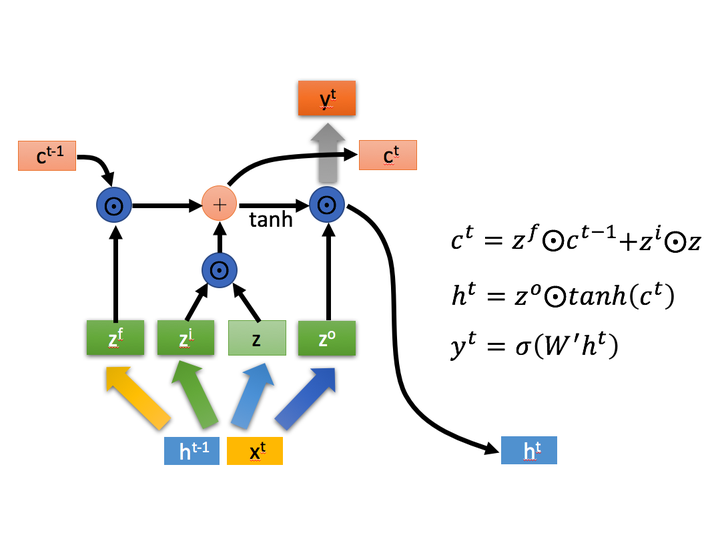
内部三个阶段
LSTM内部主要有三个阶段:
\1. 忘记阶段。这个阶段主要是对上一个节点传进来的输入进行选择性忘记。简单来说就是会 “忘记不重要的,记住重要的”。
具体来说是通过计算得到的 (f表示forget)来作为忘记门控,来控制上一个状态的
哪些需要留哪些需要忘。
\2. 选择记忆阶段。这个阶段将这个阶段的输入有选择性地进行“记忆”。主要是会对输入 进行选择记忆。哪些重要则着重记录下来,哪些不重要,则少记一些。当前的输入内容由前面计算得到的
表示。而选择的门控信号则是由
(i 代表information)来进行控制。
将上面两步得到的结果相加,即可得到传输给下一个状态的
。也就是上图中的第一个公式。
\3. 输出阶段。这个阶段将决定哪些将会被当成当前状态的输出。主要是通过 来进行控制的。并且还对上一阶段得到的
进行了放缩(通过一个tanh激活函数进行变化)。
与普通RNN类似,输出 往往最终也是通过
变化得到。

这包括两个部分。 首先,称为“输入门层”的S形层决定了我们将更新哪些值。 接下来,tanh层创建一个新候选值C̃ t的向量,该向量可以添加到状态中。 在下一步中,我们将两者结合起来以创建该状态的更新。
GRU
GRU(Gate Recurrent Unit)是循环神经网络(Recurrent Neural Network, RNN)的一种。和LSTM(Long-Short Term Memory)一样,也是为了解决长期记忆和反向传播中的梯度等问题而提出来的。
优势

更容易进行计算
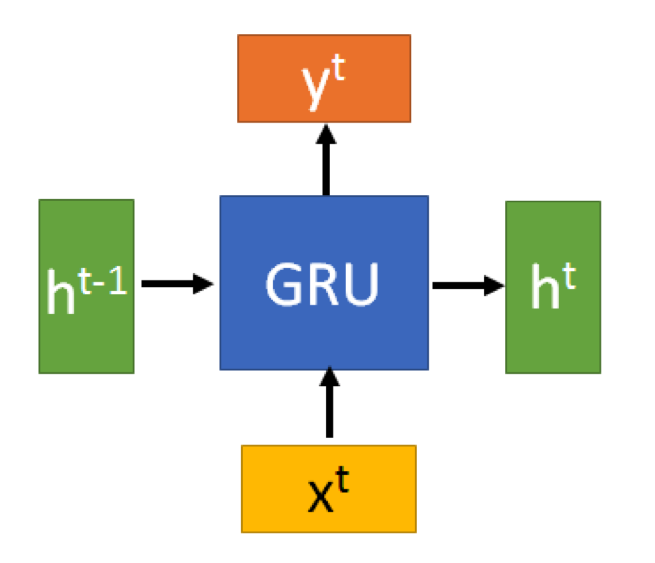
输入结构
GRU的输入输出结构与普通的RNN是一样的。
有一个当前的输入 ,和上一个节点传递下来的隐状态(hidden state)
,这个隐状态包含了之前节点的相关信息。
结合 和
,GRU会得到当前隐藏节点的输出
和传递给下一个节点的隐状态
。
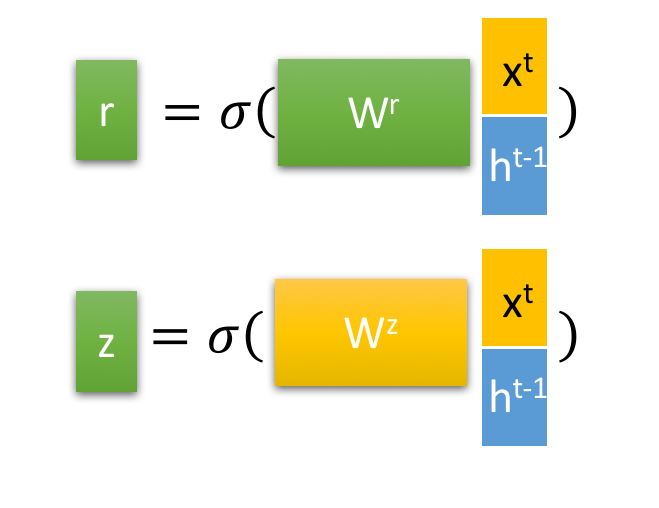
内部结构
通过上一个传输下来的状态 和当前节点的输入
来获取两个门控状态。如下图,其中
控制重置的门控(reset gate),
为控制更新的门控(update gate)。
Tips:
为sigmoid函数,通过这个函数可以将数据变换为0-1范围内的数值,从而来充当门控信号。
得到门控信号之后,首先使用重置门控来得到“重置”之后的数据 ,再将
与输入
进行拼接,再通过一个tanh激活函数来将数据放缩到-1~1的范围内。即得到如下图所示的
。

这里的 主要是包含了当前输入的
数据。有针对性地对
添加到当前的隐藏状态,相当于”记忆了当前时刻的状态“。类似于LSTM的选择记忆阶段(参照我的上一篇文章)。
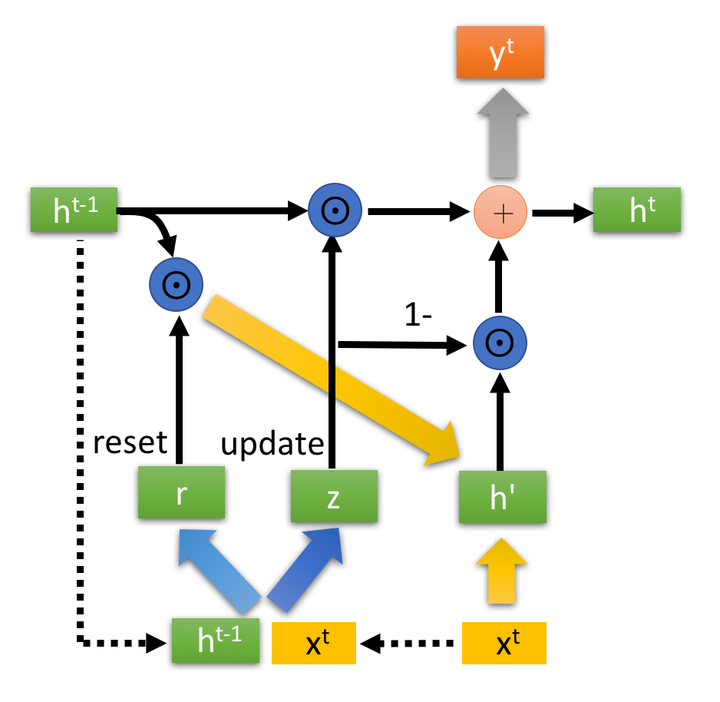
图2-3中的
是Hadamard Product,也就是操作矩阵中对应的元素相乘,因此要求两个相乘矩阵是同型的。
则代表进行矩阵加法操作。
最后介绍GRU最关键的一个步骤,我们可以称之为”更新记忆“阶段。
在这个阶段,我们同时进行了遗忘了记忆两个步骤。我们使用了先前得到的更新门控 (update gate)。
更新表达式:
首先再次强调一下,门控信号(这里的 )的范围为0~1。门控信号越接近1,代表”记忆“下来的数据越多;而越接近0则代表”遗忘“的越多。
GRU很聪明的一点就在于,我们使用了同一个门控 就同时可以进行遗忘和选择记忆(LSTM则要使用多个门控)。
:表示对原本隐藏状态的选择性“遗忘”。这里的
可以想象成遗忘门(forget gate),忘记
维度中一些不重要的信息。
: 表示对包含当前节点信息的
进行选择性”记忆“。与上面类似,这里的
同理会忘记
维度中的一些不重要的信息。或者,这里我们更应当看做是对
维度中的某些信息进行选择。
:结合上述,这一步的操作就是忘记传递下来的
中的某些维度信息,并加入当前节点输入的某些维度信息。
可以看到,这里的遗忘
LSTM与GRU比较