概念:
一幅图像包括目标物体、背景还有噪声,要想从多值的数字图像中直接提取出目标物体,最常用的方法就是设定一个阈值T,用T将图像的数据分成两部分:大于T的像素群和小于T的像素群。这是研究灰度变换的最特殊的方法,称为图像的二值化(BINARIZATION)。
作用:
二值化的所用就是将图像分成黑和白,更加有利于做图像处理判别。
每个像素点表示一个灰阶,然后我们将高于某一灰阶像素全部显示成白色,低于某一灰阶的像素点显示成黑色。这样就完成了对一幅图像二值化处理。在实际应用中,例如说金属表面,良品在照明下显示为灰阶125,而有瑕疵的产品会产生低于灰阶125的像素点,假设产生的是70,然后你设定你的判别标准时100(以上为白色,以下为黑色),这时瑕疵显示的是黑色,你测量你得到区域内图像的黑色面积,瑕疵产品的话产生的黑色面积就较大,以此你可以判别这个产品是否是次品还是良品。
类别:
- threshold:固定阈值二值化
- adaptiveThreshold:自适应阈值二值化
- Otsu’s Binarization: 基于直方图的二值化
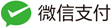
threshold:固定阈值二值化
ret, dst = cv2.threshold(src, thresh, maxval, type)
- src: 输入图,只能输入单通道图像,通常来说为灰度图
- dst: 输出图
- thresh: 阈值
- maxval: 当像素值超过了阈值(或者小于阈值,根据type来决定),所赋予的值
- type:二值化操作的类型,包含以下5种类型: cv2.THRESH_BINARY; cv2.THRESH_BINARY_INV; cv2.THRESH_TRUNC; cv2.THRESH_TOZERO;cv2.THRESH_TOZERO_INV
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('gradient.png',0)
ret,thresh1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
ret,thresh2 = cv2.threshold(img,127,255,cv2.THRESH_BINARY_INV)
ret,thresh3 = cv2.threshold(img,127,255,cv2.THRESH_TRUNC)
ret,thresh4 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO)
ret,thresh5 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO_INV)
titles = ['Original Image','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']
images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]
for i in xrange(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
adaptiveThreshold:自适应阈值二值化
自适应阈值二值化函数根据图片一小块区域的值来计算对应区域的阈值,从而得到也许更为合适的图片。
dst = cv2.adaptiveThreshold(src, maxval, thresh_type, type, Block Size, C)
-
src: 输入图,只能输入单通道图像,通常来说为灰度图
- dst: 输出图
- maxval: 当像素值超过了阈值(或者小于阈值,根据type来决定),所赋予的值
- thresh_type: 阈值的计算方法,包含以下2种类型:cv2.ADAPTIVE_THRESH_MEAN_C; cv2.ADAPTIVE_THRESH_GAUSSIAN_C.
- type:二值化操作的类型,与固定阈值函数相同,包含以下5种类型: cv2.THRESH_BINARY; cv2.THRESH_BINARY_INV; cv2.THRESH_TRUNC; cv2.THRESH_TOZERO;cv2.THRESH_TOZERO_INV.
- Block Size: 图片中分块的大小
- C :阈值计算方法中的常数项
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('sudoku.png',0)
img = cv2.medianBlur(img,5)
ret,th1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
th2 = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_MEAN_C,\
cv2.THRESH_BINARY,11,2)
th3 = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
cv2.THRESH_BINARY,11,2)
titles = ['Original Image', 'Global Thresholding (v = 127)',
'Adaptive Mean Thresholding', 'Adaptive Gaussian Thresholding']
images = [img, th1, th2, th3]
for i in xrange(4):
plt.subplot(2,2,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()

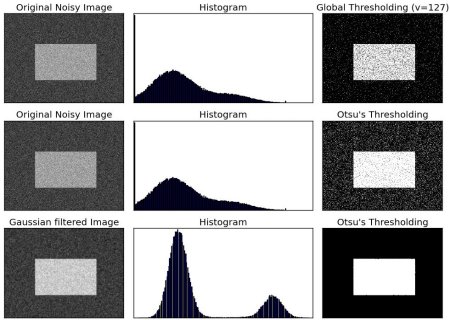
Otsu’s Binarization: 基于直方图的二值化
Otsu’s Binarization是一种基于直方图的二值化方法,它需要和threshold函数配合使用。
Otsu过程:
- 计算图像直方图;
- 设定一阈值,把直方图强度大于阈值的像素分成一组,把小于阈值的像素分成另外一组;
- 分别计算两组内的偏移数,并把偏移数相加;
- 把0~255依照顺序多为阈值,重复1-3的步骤,直到得到最小偏移数,其所对应的值即为结果阈值。
import cv2 import numpy as np from matplotlib import pyplot as plt img = cv2.imread('noisy2.png',0) # global thresholding ret1,th1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY) # Otsu's thresholding ret2,th2 = cv2.threshold(img,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU) # Otsu's thresholding after Gaussian filtering blur = cv2.GaussianBlur(img,(5,5),0) ret3,th3 = cv2.threshold(blur,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU) # plot all the images and their histograms images = [img, 0, th1, img, 0, th2, blur, 0, th3] titles = ['Original Noisy Image','Histogram','Global Thresholding (v=127)', 'Original Noisy Image','Histogram',"Otsu's Thresholding", 'Gaussian filtered Image','Histogram',"Otsu's Thresholding"] for i in xrange(3): plt.subplot(3,3,i*3+1),plt.imshow(images[i*3],'gray') plt.title(titles[i*3]), plt.xticks([]), plt.yticks([]) plt.subplot(3,3,i*3+2),plt.hist(images[i*3].ravel(),256) plt.title(titles[i*3+1]), plt.xticks([]), plt.yticks([]) plt.subplot(3,3,i*3+3),plt.imshow(images[i*3+2],'gray') plt.title(titles[i*3+2]), plt.xticks([]), plt.yticks([]) plt.show()